


Swiwin + Jeti + V-speak = loosing my mind
 04-06-2024, 08:47 PM
04-06-2024, 08:47 PM
#1

All right I give up. This setup simply doesn't work me and I'm going to fly my new jet without telemetry. Honestly I don't understand why this is so hard.
Hardware: Jeti 24, CentralBox 210, Rex12, R3, Swiwin 240, V-Speak telemetry module. Jeti firmware updated to last version
Problem: no matter what I do, I can't have throttle control and telemetry. I can use the turbine without telemetry but as soon as I add telemetry either in EX-Bus mode or Sensor mode the throttle is no longer working.
So if I switch v-speak to EX Bus, I can get telemetry to work but I can't control the throttle. Yes, I watched Jon from Lighter Side of RC's excellent video and yes I'm using channel 1 for the throttle. It makes no difference unfortunately.
So i switched the v-speak to "Sensor" mode, well the thing resets to that mode automatically anyway and if I connect it to a telemetry input port and connected the grey single wire to the throttle servo port, I get the telemetry to work but again, the throttle doesn't work being stuck at mid point.
If I remove the v-speak unit the throttle works fine connecting the servo port to the PPM port although I had to switch the CentralBox frequency from Auto to 8mhz but no big deal.
Any of you found a way to make this work? Any pointers would be appreciated.
Thanks!
Arnaud
Hardware: Jeti 24, CentralBox 210, Rex12, R3, Swiwin 240, V-Speak telemetry module. Jeti firmware updated to last version
Problem: no matter what I do, I can't have throttle control and telemetry. I can use the turbine without telemetry but as soon as I add telemetry either in EX-Bus mode or Sensor mode the throttle is no longer working.
So if I switch v-speak to EX Bus, I can get telemetry to work but I can't control the throttle. Yes, I watched Jon from Lighter Side of RC's excellent video and yes I'm using channel 1 for the throttle. It makes no difference unfortunately.
So i switched the v-speak to "Sensor" mode, well the thing resets to that mode automatically anyway and if I connect it to a telemetry input port and connected the grey single wire to the throttle servo port, I get the telemetry to work but again, the throttle doesn't work being stuck at mid point.
If I remove the v-speak unit the throttle works fine connecting the servo port to the PPM port although I had to switch the CentralBox frequency from Auto to 8mhz but no big deal.
Any of you found a way to make this work? Any pointers would be appreciated.
Thanks!
Arnaud
Last edited by acw; 04-06-2024 at 09:08 PM. Reason: typos
 04-06-2024, 09:23 PM
04-06-2024, 09:23 PM
#2
There�s a new update from Vspeak that will allow you to use the single white wire as your throttle cable directly from your CB. Avoid all the throttle communication over the Bus.
Email Volker and he�ll send you the update.
Email Volker and he�ll send you the update.
04-06-2024, 09:59 PM
#3
I have lost count of the number of times I have posted messages telling people not to use Auto output period. Swiwin's intolerant electronics or software cannot cope with it.
Last edited by harrycurzon; 04-06-2024 at 10:40 PM.
04-06-2024, 10:26 PM
#4
I've been trying to find a way to contact Vspeak about an issue I have. What's their email?
04-07-2024, 12:02 AM
#5
Thats true. It might work a while and then it doesnt. Set it to 13ms or something from rx/ cb whatever and it works.
04-07-2024, 07:49 PM
#8

Do you only need to change the output period on the Central Box (leaving the receivers output period on Auto)? I'm still having inconsistent telemetry results from my Swiwin without a Vspeak...
04-07-2024, 10:10 PM
#9
Yes. Only the Rx or CB that the swiwin/servo/whatever is plugged into matters. Never use Auto. Always use a defined number. Use that rule for everything not just with Swiwin. However you can ignore the servo output period on all receivers that feed a central box, powerbox, etc, as the setting has no effect on an Exbus data feed which runs at the 100Hz or 50Hz transmission rate set in the transmitter.
Last edited by harrycurzon; 04-08-2024 at 12:48 AM.
04-09-2024, 11:29 PM
#10

Join Date: Aug 2018
Posts: 18
Likes: 0
Received 0 Likes
on
0 Posts
All right I give up. This setup simply doesn't work me and I'm going to fly my new jet without telemetry. Honestly I don't understand why this is so hard.
Hardware: Jeti 24, CentralBox 210, Rex12, R3, Swiwin 240, V-Speak telemetry module. Jeti firmware updated to last version
Problem: no matter what I do, I can't have throttle control and telemetry. I can use the turbine without telemetry but as soon as I add telemetry either in EX-Bus mode or Sensor mode the throttle is no longer working.
So if I switch v-speak to EX Bus, I can get telemetry to work but I can't control the throttle. Yes, I watched Jon from Lighter Side of RC's excellent video and yes I'm using channel 1 for the throttle. It makes no difference unfortunately.
So i switched the v-speak to "Sensor" mode, well the thing resets to that mode automatically anyway and if I connect it to a telemetry input port and connected the grey single wire to the throttle servo port, I get the telemetry to work but again, the throttle doesn't work being stuck at mid point.
If I remove the v-speak unit the throttle works fine connecting the servo port to the PPM port although I had to switch the CentralBox frequency from Auto to 8mhz but no big deal.
Any of you found a way to make this work? Any pointers would be appreciated.
Thanks!
Arnaud
Hardware: Jeti 24, CentralBox 210, Rex12, R3, Swiwin 240, V-Speak telemetry module. Jeti firmware updated to last version
Problem: no matter what I do, I can't have throttle control and telemetry. I can use the turbine without telemetry but as soon as I add telemetry either in EX-Bus mode or Sensor mode the throttle is no longer working.
So if I switch v-speak to EX Bus, I can get telemetry to work but I can't control the throttle. Yes, I watched Jon from Lighter Side of RC's excellent video and yes I'm using channel 1 for the throttle. It makes no difference unfortunately.
So i switched the v-speak to "Sensor" mode, well the thing resets to that mode automatically anyway and if I connect it to a telemetry input port and connected the grey single wire to the throttle servo port, I get the telemetry to work but again, the throttle doesn't work being stuck at mid point.
If I remove the v-speak unit the throttle works fine connecting the servo port to the PPM port although I had to switch the CentralBox frequency from Auto to 8mhz but no big deal.
Any of you found a way to make this work? Any pointers would be appreciated.
Thanks!
Arnaud
forum.powerbox-systems.com/forum/index.php?thread/15436-vspeak-swiwin/&postID=98750#post98750
Our Swiwin VSpeak converter behaves similarly for Jeti (EX-Bus) and Powerbox, with both telemetry + throttle signal being transmitted via the bus.
With Jeti, the same servo channels for the throttle signal must be set in the transmitter and in the Vspeak.


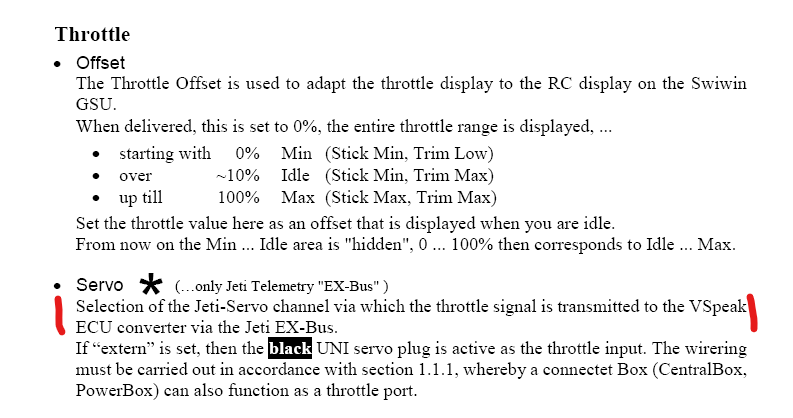
If Jeti-Ex-bus is not used, but rather "normal" Jeti sensor telemetry (VSpeak in delivery condition), then the 1-pin cable must be connected to the respective throttle servo port of the receiver or the box used.
04-10-2024, 04:49 AM
#11
Wayne
The following users liked this post:
mongo (04-10-2024)
04-10-2024, 11:20 AM
#12
Thanks Volker. Hopefully this helps other people. On my side I have decided to use the regular swiwin telemetry and time permit develop a lua app to approximate fuel consumption based on pump voltage.
Last edited by acw; 04-10-2024 at 11:29 AM.
 04-14-2024, 06:40 PM
04-14-2024, 06:40 PM
#15
Unfortunately I'm still unsuccessful in getting the telemetry to show up consistently (note I haven't been using a v-speak). I've randomly had it work several times, but it eventually stops. I've messed with different output periods (other than Auto) but that doesn't seem to have made a difference. Any other suggestions or things to check? Would using a v-speak rather than the direct Swiwin telemetry improve anything?
04-14-2024, 07:28 PM
#16
Hey Flaz. Here is what worked for me to make the Swiwin telemetry work with Jeti.
- connected my centralbox throttle servo the the PPM port
- connected my first RX (an R12) Ext port to the telemetry port of the ECU. That Ext port is configured as "Jetibox". I think that for some reason the trick is to connect it to a receiver, not the central box. Not sure why. Maybe it works with the central box port setup as jetibox. Haven't tried that yet.
I personally no longer want to use V-Speak or any device that requires the throttle channel to go through it. That makes that device a single point of failure.
I have developed a lua app for jeti that computes the fuel used based on the Swiwin pump voltage. I'll share that in a few days with the community once it is fully tested.
Arnaud
- connected my centralbox throttle servo the the PPM port
- connected my first RX (an R12) Ext port to the telemetry port of the ECU. That Ext port is configured as "Jetibox". I think that for some reason the trick is to connect it to a receiver, not the central box. Not sure why. Maybe it works with the central box port setup as jetibox. Haven't tried that yet.
I personally no longer want to use V-Speak or any device that requires the throttle channel to go through it. That makes that device a single point of failure.
I have developed a lua app for jeti that computes the fuel used based on the Swiwin pump voltage. I'll share that in a few days with the community once it is fully tested.
Arnaud
04-15-2024, 06:41 AM
#17

I have a similar setup� rex 10, r3 and a CB200
i had to use a R3 rx to setup the vspeak to be exbus.
then the vspeak is plugged into an EXbus port in the Rex10 receiver (which is plugged into Rx1 port on the CB200).
the rex10 port the vspeak is plugged into was set to exbus.
the swiwin ecu then had the throttle channel set to one of its available channels. In my case, i used channel 1 for throttle, then i setup the TX so function 1 was throttle. The vspeak was also setup so channel 1 was used for throttle.
This gave me useable telemetry and throttle channel useage.
i also have to use JB2 emulator to access the vspeak programming with it plugged into the rex10 rx.
There is something odd about the vspeak when you start mixing rx�s withs the central boxes that seems like it requires the vspeak to go direct to the rx and not the central box. I say this bc on another model that uses two R3�s and a Cb200, the vspeak is directly in the ext port on the CB200 and uses JB1 emulator.
i had to use a R3 rx to setup the vspeak to be exbus.
then the vspeak is plugged into an EXbus port in the Rex10 receiver (which is plugged into Rx1 port on the CB200).
the rex10 port the vspeak is plugged into was set to exbus.
the swiwin ecu then had the throttle channel set to one of its available channels. In my case, i used channel 1 for throttle, then i setup the TX so function 1 was throttle. The vspeak was also setup so channel 1 was used for throttle.
This gave me useable telemetry and throttle channel useage.
i also have to use JB2 emulator to access the vspeak programming with it plugged into the rex10 rx.
There is something odd about the vspeak when you start mixing rx�s withs the central boxes that seems like it requires the vspeak to go direct to the rx and not the central box. I say this bc on another model that uses two R3�s and a Cb200, the vspeak is directly in the ext port on the CB200 and uses JB1 emulator.
The following users liked this post:
flaz (04-20-2024)
04-24-2024, 10:48 AM
#19
Thank you acw invertmast & harrycurzon
My Swiwin telemetry issues have been tracked down. They were due to using R3/RSW receivers with the Central Box 210. Once I switched the primary receiver to a EX R7 and plugged the Swiwin telemetry directly into it (instead of the Central Box), telemetry showed up immediately. I have the R7 output period set to 8ms. This was driving me crazy, so thank you all for the tips about connecting the Swiwin telemetry directly to the receiver EXT port. ...I guess I now have an extra R3 ready for the next project
My Swiwin telemetry issues have been tracked down. They were due to using R3/RSW receivers with the Central Box 210. Once I switched the primary receiver to a EX R7 and plugged the Swiwin telemetry directly into it (instead of the Central Box), telemetry showed up immediately. I have the R7 output period set to 8ms. This was driving me crazy, so thank you all for the tips about connecting the Swiwin telemetry directly to the receiver EXT port. ...I guess I now have an extra R3 ready for the next project
The following users liked this post:
acw (04-24-2024)
 04-25-2024, 02:28 AM
04-25-2024, 02:28 AM
#21

